Machine Learning
k-nearest neighbors (k-NN) algorithm
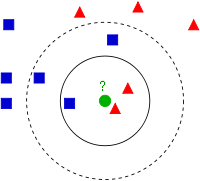
We have a new member which is shown as green circle. It should be added to one of these Blue/Red families. We call that process, classification.
"Example of k-NN classification. The test sample (green circle) should be classified either to the first class of blue squares or to the second class of red triangles. If k = 3 (solid line circle) it is assigned to the second class because there are 2 triangles and only 1 square inside the inner circle. If k = 5 (dashed line circle) it is assigned to the first class (3 squares vs. 2 triangles inside the outer circle)." - wiki - k-nearest neighbors algorithm.
This method of classification is called k-Nearest Neighbors since classification depends on k nearest neighbors.
"k-NN is a type of instance-based learning, or lazy learning, where the function is only approximated locally and all computation is deferred until classification. The k-NN algorithm is among the simplest of all machine learning algorithms."
A drawback of the basic "majority voting" classification occurs when the class distribution is skewed.
"Both for classification and regression, it can be useful to weigh the contributions of the neighbors, so that the nearer neighbors contribute more to the average than the more distant ones. For example, a common weighting scheme consists in giving each neighbor a weight of 1/d, where d is the distance to the neighbor."
The neighbors are taken from a set of objects for which the class (for k-NN classification) or the object property value (for k-NN regression) is known. This can be thought of as the training set for the algorithm, though no explicit training step is required.
"A shortcoming of the k-NN algorithm is that it is sensitive to the local structure of the data."
We will create two classes (Red and Blue), and label the Red family as Class-0 and Blue family as Class-1 with 25 training data set, and label them either Class-0 or Class-1.
We do all this using Random Number Generator in Numpy, the (x,y) coordinates will be in the range of (1, 100):
# Feature set containing (x,y) values of 25 known/training data trainData = np.random.randint(0,100,(25,2)).astype(np.float32)
Instantiate the kNN algorithm:
knn = cv2.KNearest()
Then, we pass the trainData and responses to train the kNN:
knn.train(trainData,responses)
It will construct a search tree.
The sample should be a floating point array. The size of the sample is (# of samples) x (# of features) = (1 x 2). In other words, we will use 1 sample for two classes (Red or Blue feature), which makes the size of the same (1,2) as shown in the code:
newcomer = np.random.randint(0,100,(1,2)).astype(np.float32)
Then we find three neighbors and predicts responses for input vectors:
ret, results, neighbours ,dist = knn.find_nearest(newcomer, 3)
Actually, the syntax for find_nearest() looks like this:
cv2.KNearest.find_nearest(samples, k[, results[, neighborResponses[, dists]]]) â retval, results, neighborResponses, dists
Where the parameters are:
- samples : Input samples stored by rows. It is a single-precision floating-point matrix of $number\_of\_samples \times number\_of\_features$ size.
- k : Number of used nearest neighbors. It must satisfy constraint: $k \le CvKNearest::get\_max\_k()$.
- results : Vector with results of prediction (regression or classification) for each input sample. It is a single-precision floating-point vector with number_of_samples elements.
- neighbors : Optional output pointers to the neighbor vectors themselves. It is an array of $k*samples->rows$ pointers.
- neighborResponses : Optional output values for corresponding neighbors. It is a single-precision floating-point matrix of $number\_of\_samples \times k$ size.
- dist : Optional output distances from the input vectors to the corresponding neighbors. It is a single-precision floating-point matrix of $number\_of\_samples \times k$ size.
import cv2 import numpy as np import matplotlib.pyplot as plt # Feature set containing (x,y) values of 25 known/training data trainData = np.random.randint(0,100,(25,2)).astype(np.float32) # Labels each one either Red or Blue with numbers 0 and 1 responses = np.random.randint(0,2,(25,1)).astype(np.float32) # plot Reds red = trainData[responses.ravel()==0] plt.scatter(red[:,0],red[:,1],80,'r','^') # plot Blues blue = trainData[responses.ravel()==1] plt.scatter(blue[:,0],blue[:,1],80,'b','s') # CvKNearest instance knn = cv2.KNearest() # trains the model knn.train(trainData,responses) # New sample : (x,y) newcomer = np.random.randint(0,100,(1,2)).astype(np.float32) plt.scatter(newcomer[:,0],newcomer[:,1],80,'g','o') # Finds the 3nearest neighbors and predicts responses for input vectors ret, results, neighbours, dist = knn.find_nearest(newcomer, 3) print "result: ", results,"\n" print "neighbours: ", neighbours,"\n" print "distance: ", dist plt.show()
With the output:
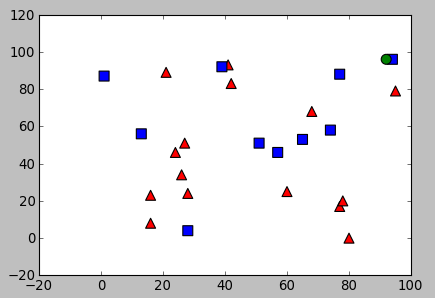
result: [[ 1.]] neighbours: [[ 1. 1. 0.]] distance: [[ 4. 289. 298.]]
The result is 1 which indicate the new sample belongs blue class:
With the output:
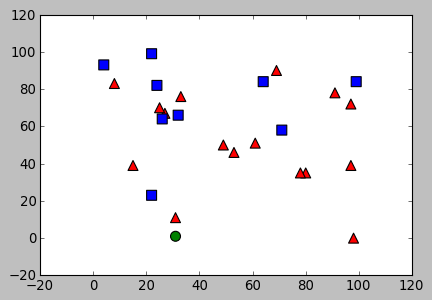
result: [[ 0.]] neighbours: [[ 0. 1. 0.]] distance: [[ 100. 565. 1700.]]
The result is 0 which indicate the new sample belongs red class:
With the output:
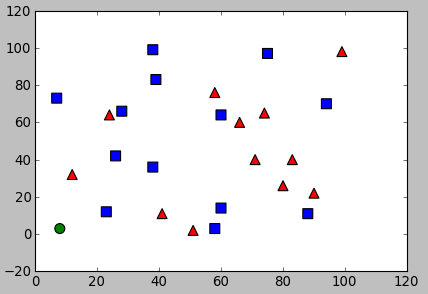
result: [[ 0.]] neighbours: [[ 1. 0. 0.]] distance: [[ 306. 857. 1153.]]
The result is 0 which indicate the new sample belongs red class:
However, if we had used $k=5$, it could have been classified as blue.
OpenCV 3 Tutorial
image & video processing
Installing on Ubuntu 13
Mat(rix) object (Image Container)
Creating Mat objects
The core : Image - load, convert, and save
Smoothing Filters A - Average, Gaussian
Smoothing Filters B - Median, Bilateral
OpenCV 3 image and video processing with Python
OpenCV 3 with Python
Image - OpenCV BGR : Matplotlib RGB
Basic image operations - pixel access
iPython - Signal Processing with NumPy
Signal Processing with NumPy I - FFT and DFT for sine, square waves, unitpulse, and random signal
Signal Processing with NumPy II - Image Fourier Transform : FFT & DFT
Inverse Fourier Transform of an Image with low pass filter: cv2.idft()
Image Histogram
Video Capture and Switching colorspaces - RGB / HSV
Adaptive Thresholding - Otsu's clustering-based image thresholding
Edge Detection - Sobel and Laplacian Kernels
Canny Edge Detection
Hough Transform - Circles
Watershed Algorithm : Marker-based Segmentation I
Watershed Algorithm : Marker-based Segmentation II
Image noise reduction : Non-local Means denoising algorithm
Image object detection : Face detection using Haar Cascade Classifiers
Image segmentation - Foreground extraction Grabcut algorithm based on graph cuts
Image Reconstruction - Inpainting (Interpolation) - Fast Marching Methods
Video : Mean shift object tracking
Machine Learning : Clustering - K-Means clustering I
Machine Learning : Clustering - K-Means clustering II
Machine Learning : Classification - k-nearest neighbors (k-NN) algorithm
Ph.D. / Golden Gate Ave, San Francisco / Seoul National Univ / Carnegie Mellon / UC Berkeley / DevOps / Deep Learning / Visualization